Research
Active Learning of Gaussian Process Surrogates
This project aims to develop scalable and efficient active learning algorithms for adaptive sampling using Gaussian process (GP) surrogates. We provide closed-form gradients of numerous acquisition functions to improve the prediction accuracy of surrogate models and alleviate the computations for high-dimensional spaces in adaptive sampling. New exploration-exploitation active learning methods are introduced to enable real-time implementation of robotic applications with single and multi-agent systems.
Keywords: Gaussian Processes, Active Learning, Adaptive Sampling, Multi-Agent Systems.
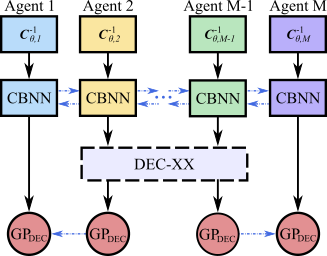
Decentralized Learning with Gaussian Processes [GitHub-GPyTorch], [GitHub-GPML]
[ICRA21-1]
The goal of this project is to decentralize the implementation of Gaussian processes (GPs) in multi-agent systems. Decentralized GP training of the hyper-parameters is performed with the alternating direction method of multipliers in closed-form. Numerous aggregation of GP experts techniques are decentralized with the use of iterative and consensus methods. A covariance-based nearest neighbor selection strategy is introduced to enable a subset of agents to perform predictions.
Keywords: Gaussian Processes, Decentralized Networks, Multi-Agent Systems, Distributed Optimization.
Online Kinodynamic Motion Planning with Q-Learning
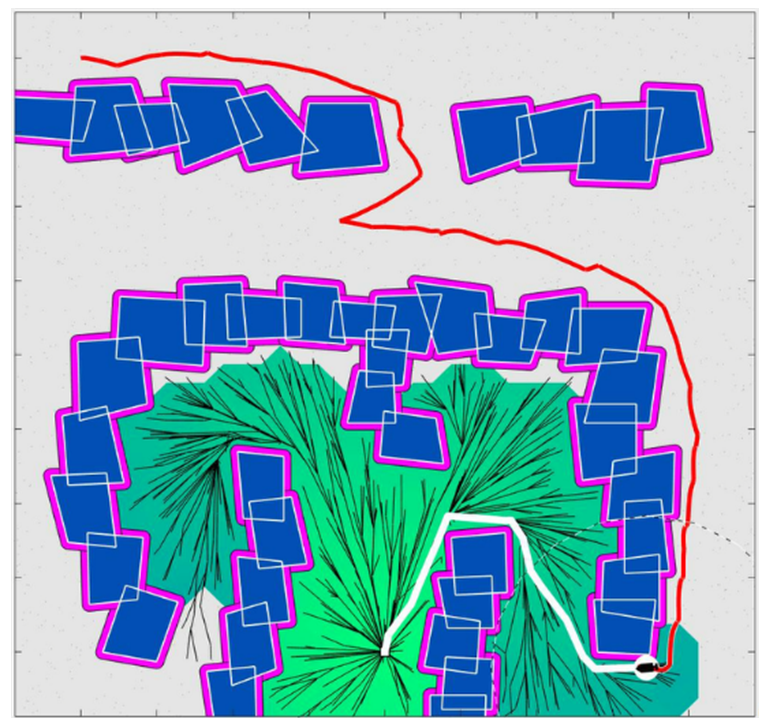
The aim of this project is to provide online and safe kinodynamic motion planning algorithms with completely unknown/uncertain dynamics, based on continuous-time Q-learning. We utilize integral reinforcement learning to develop tuning laws for the online approximation of the optimal cost and the optimal policy in continuous-time. We modify motion planning techniques to perform efficient online local re-planning by employing topological connectedness tools.
Keywords: Motion Planning, Reinforcement Learning, Optimal Control, Game Theory.
Adaptive Orthosis for Distal Extremity Trauma
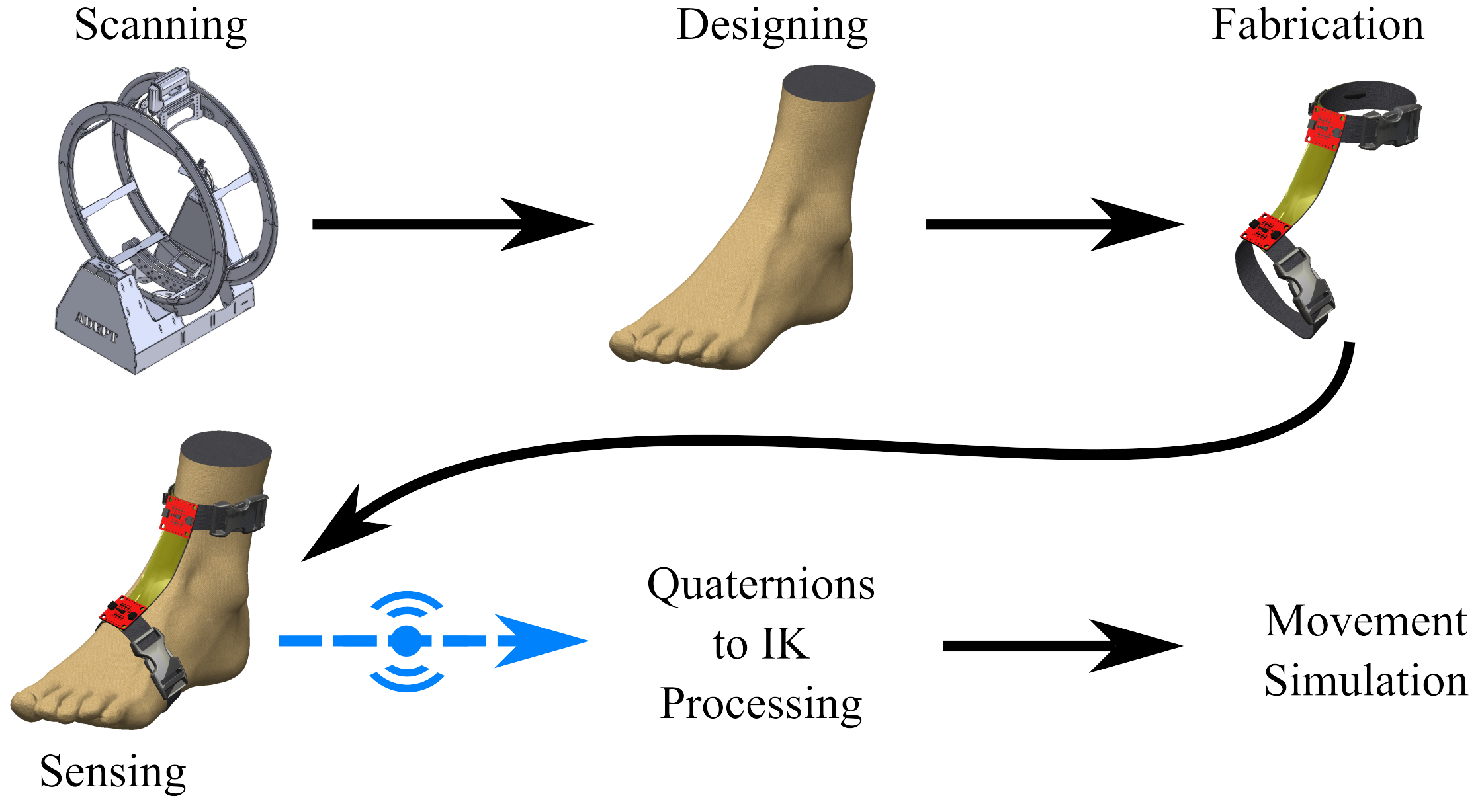
This project focuses on the development of a personalized, sensorized ankle brace for injury prevention and trauma mitigation. It builds on a wearable inertial sensing platform and subject-specific anatomical modeling to accurately capture ankle kinematics. High-resolution 3D scanning informs optimal sensor placement and individualized brace design. The resulting sensor data are used for classification of high-risk movement patterns and to drive the development of an active orthosis to prevent injury or reduce its severity.
Keywords: Wearable Biomechanics, Injury Risk Classification, Adaptive Orthoses.
Sponsor: HJF
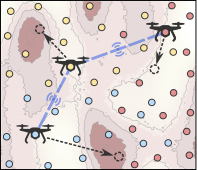
Multi-Robot Hazard Detection in Communication-Denied Environments
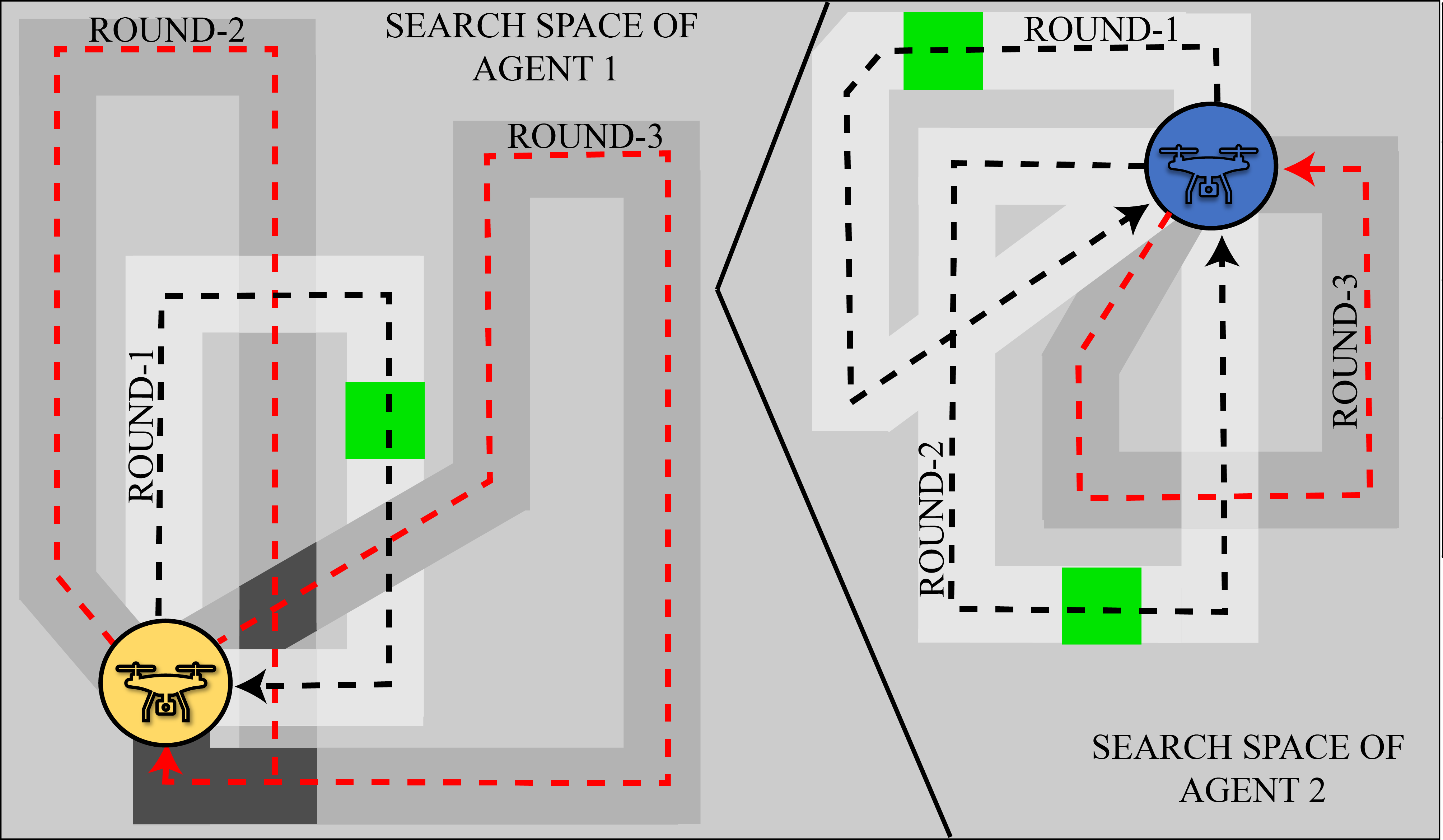
This project focuses on the detection of hazards or targets in communication-denied environments. The survival of agents when traversing a path is employed as a sensor observation of hazards. In other words, when an agent returns back to the station we presume that there is no hazard in the traversed path, otherwise the disappearance of an agent indicates a hazard at an unknown location of the planned path. To distribute the efforrt of exploration, we decompose the environment with entropy-weighted Voronoi partitions. In addition, we use probabilistic graphical modeling with Bayesian networks to increase the rate of information gathering and reduce the computations.
Keywords: Informative Path Planning, Bayesian Inference, Multi-Agent Systems, Bayesian Networks.
Prediction of Wireless Communication Performance with Kriging
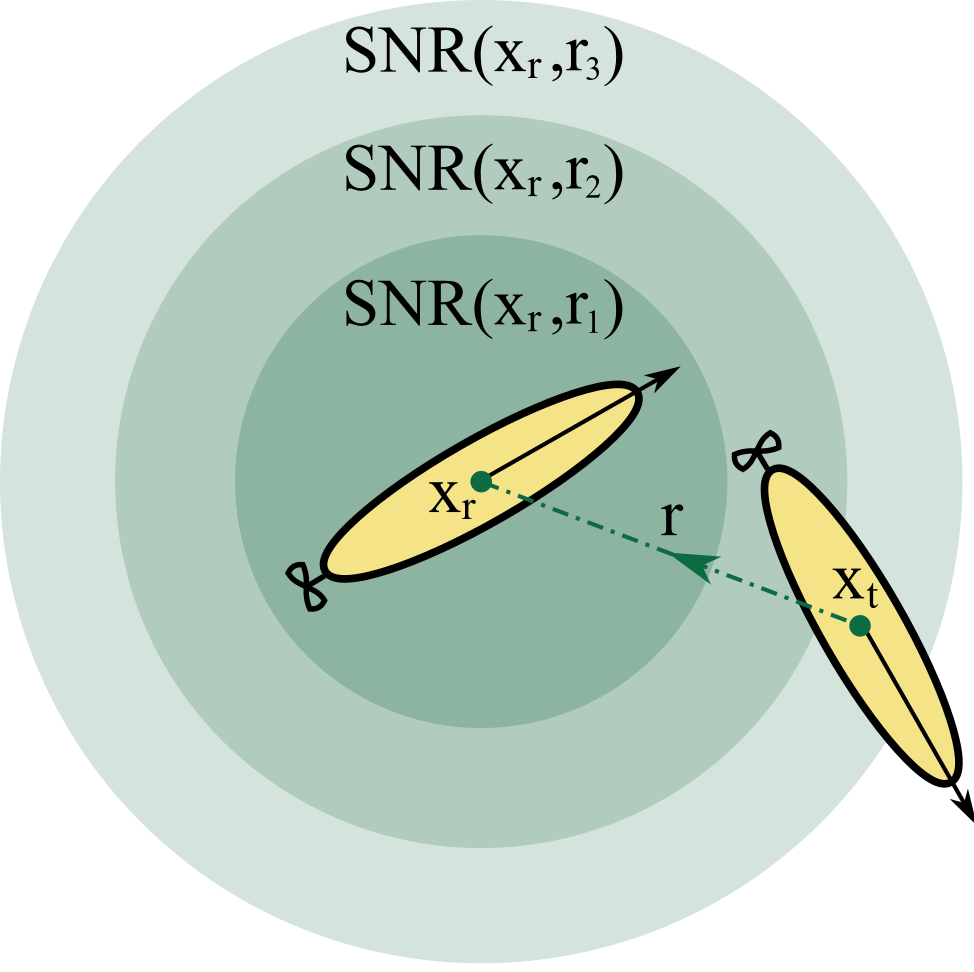
The intent of this project is to develop methodologies for the prediction of underwater acoustic (UWA) communication performance. The measurements are modeled by a non-stationary Gaussian random field with a deterministic mean structure and a stochastic random component. We formulate basis functions inspired by acoustic propagation models to identify a spatial trend. Covariance estimation is addressed with a multi-stage iterative training method that produces unbiased and robust results with nested models. Prediction of UWA communication performance is performed with universal kriging.
Keywords: Spatial Prediction, Marine Robotics, Autonomous Underwater Vehicles, Communication Performance.
Anthropomorphic Robot Hands [GitHub page]
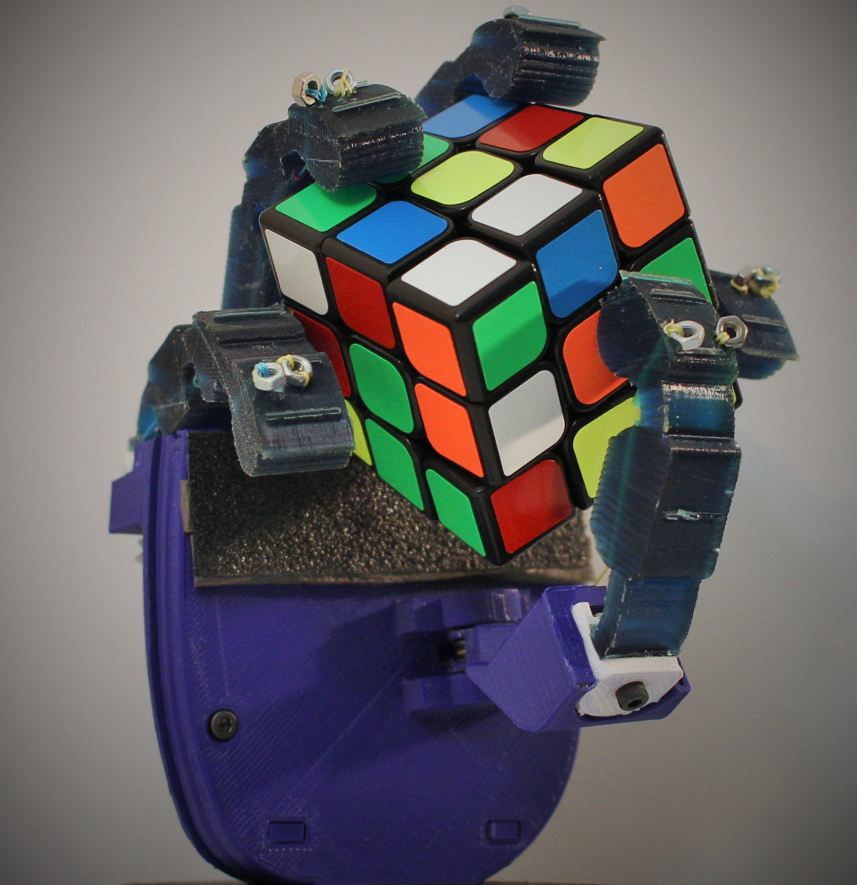
This research project contributes to the development of a new class of anthropomorphic, adaptive robot hands. The robot hands can operate in unstructured environments and can achieve various grasping and in-hand manipulation actions with minimal number of actuators. The design is optimized according to the human hand characteristics as described in anthropometric studies. The fabrication procedure consists of 3D printing and deposition manufacturing techniques.
Keywords: Adaptive Robot Hands, Compliant Mechanisms, Dexterous Manipulation.
Prosthetic Hands [GitHub page]
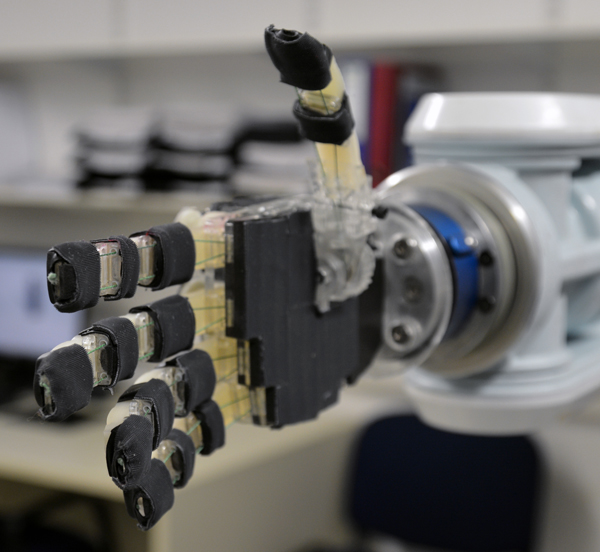
This research project focuses on the design and development of anthropomorphic, underactuated, personalized robot hands of low cost and weight. Elastic joints were selected to introduce passive compliance in the hand's structure, to simplify the control problem, and to enhance the grasping capabilities. We devise various differential mechanisms to facilitate the execution of different grasping postures and gestures.
Keywords: Prosthesis design, Differential Mechanisms, Robust Grasping.